システムとしての制御対象は静的、動的の2つに大別できる。 静的なシステムとはtにおける入力値のみで出力が決まるシステムで、バネがその一例である。 動的なシステムとは入出力関係が変数の微分になるものである。
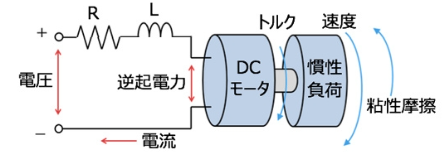
回路部分 \(L_a \frac{di_a(t)}{dt} + R_a i_a(t) = b_a(t) - v_b(t)\) \(v_a(t)\) : 電圧 \(v_b(t)\) : 逆起電力
 回路部分
回路部分