人間機械システム テスト対策
TABLE OF CONTENTS
- インタフェースにおける制約
- フールプルーフとフェイルセーフ
- ユーザーモデルと設計モデル
- ヒューマンモデル
- インタフェースの評価方法
- 心理物理学的実験
- ウェーバー則とフェヒナー則
- 信号検出理論
- d’の計算
- ROC
- 尺度
- 脳について
- 脳活動の計測方法
- ブレインーマシン・インタフェース
- 2024過去問
インタフェースにおける制約
〇 ユーザー動作の制約
| 名前 | 例 |
|---|---|
| 物理的制約 | SDカード、ハサミ |
| 意味的制約 | アイコン |
| 文化的制約 | 進、戻るボタンの左右配置 |
| 論理的制約 | GUIなどの動作に関する制約 |
物理的制約について、反対にマウスや特殊なキーボードなどユーザーに大きな自由度を与えるものもある。
〇 マッピング
動作と結果の整合性をとる。
例:
ガスコンロ、教室スイッチ、乗車シート、フライトゲーム
〇 アフォーダンス
使い方の正しい認識を促す
形状や大きさから、何に使うものなのかをはっきりとさせる。
ドアノブの形状、段差or腰掛
〇 標準化
最終手段
すでにつかわれている形状を流用する。
エレベータのボタン、電源ボタン、保存ボタン、キーボード
フールプルーフとフェイルセーフ
〇 fool proof
無意識に重要な操作をできないようにする。
レンジ、洗濯機、SDカード
〇 fail safe
誤作動や誤操作を想定し、対策をとっておく。
レバー式水道、ヒューズ、列車のブレーキ
ユーザーモデルと設計モデル
- ユーザーモデル
ユーザーが考える動作。メンタルモデル。
ユーザーが経験を通して構築する。 - 設計モデル
実際の動作
2つの食い違いにより故障などが起こる恐れがある。 説明書はユーザが正しいモデルを作成する助けとなる。
ヒューマンモデル
〇 モデルヒューマンプロセッサ
記憶部と3つのプロセッサから成る。 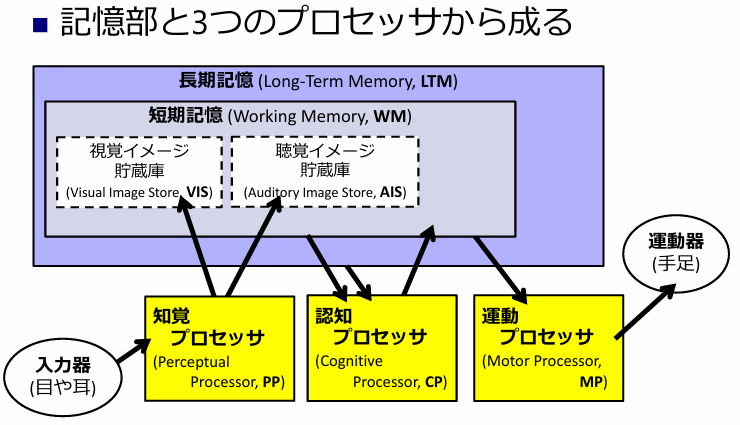
- 知覚プロセッサ
入力受け取り - 認識プロセッサ
中間管理職
知覚、運動の接続のみの単純なものから推論、意思決定などを行う高度な物まである。 - 運動プロセッサ
自発運動の生成
〇 パラメータ
- \(\mu\)
記憶容量 - \(\tau\)
処理に要する最小処理時間 - \(\delta\)
記憶の減衰時間 - \(\kappa\)
記憶される情報の表象コード
〇 特徴
心理学における研究成果をまとめ、入力から運動までの所要時間を算出した。
人間における情報処理プロセスが整理された。
情緒的な面は考慮外
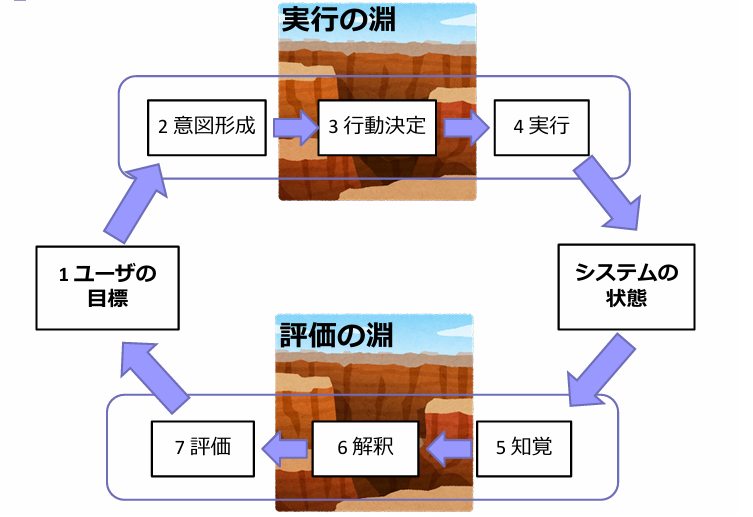
〇 ノーマンの7階層モデル
意思決定および評価フィードバックを示す。
- 目標を立てる
- 実行する
意図形成
行動決定
実行 - 評価する
知覚
解釈
評価
“目標を立てる”を含んだ7段階
〇 淵
実行の淵(=実行)と評価の淵(=解釈) が存在し、これらにユーザ目標とシステム上体との隔たりが生まれる。
〇 例
冷凍庫の温度調整
| モデル | 行動 |
|---|---|
| 目標 | 冷蔵庫の温度を変えずに冷凍庫の温度を下げる |
| 意図形成 | 冷凍庫のつまみを強に回す |
| 行動決定 | 冷凍庫の扉を開け、つまみを回し、扉を閉める |
| 実行 | やる |
| 近く | 冷凍庫の温度計を見る、冷蔵庫のないの野菜の状態を調べる |
| 解釈 | 冷凍室の温度は望み通りだが、冷蔵庫の温度も下がったことを知る。 |
| 評価 | なぜ? |
ユーザーインターフェースにおいて、これらの隔たりを小さくすることが望ましい。
〇 ラスムッセンの3階層モデル
行為の自動化に注目したモデル。
行為の自動化は以下の3つの認知階層に支配される。
- 技能ベース
もっと熟達している。反射で行われる。
赤信号で無意識にブレーキを踏む - 規則ベース
過去の経験から獲得したルールを用いる。
止まれという意味の赤信号を見る→ブレーキを踏む - 知識ベース
外界を認知、解釈することにより心理モデルを構築 赤信号を見る→赤は危なそうだなと思う→ブレーキを踏む
インタフェースの評価方法
前項までのまとめ
- 定性的評価方法
制約、マッピング、アフォーダンス、モデルの整合性、淵の評価 - GUI設計の指針という観点から
直接操作、メタファー、undo、適度な量のモード、統一性、ターゲット層との乖離、適切なエラー
ここでは定量的に評価する方法を考える。
定量化により複数のインターフェースを客観的に比較することができる。
GOMSモデル
| モデルの中身 | 内容 | 例 |
|---|---|---|
| Goal | 課題、なすべきこと | 次の段落の冒頭単語を太字にする |
| Operators | 具体的な行為 | カーソルをキーで移動、ツールバーからボタンを探す…etc |
| Method | 課題を達成する方法。複数オペレータからなる。 | Operators動作の統合による手続き |
| Selection rules | 複数の達成方法からどれを選ぶか | どの方法を選ぶか。ショートカットキーの方が早い…? |
GOMSモデルでは手順やゴールをさらに小さいものに分解することで評価することができる。
-
KLMモデル
GOMSモデルの定量化手法。 動作それぞれに時間を定義する。
例えばPC入力について
Keying, Pointing, Homing, Buttonn pressing, Mentaly preparing, Responding
のように複数の動作を定義し、それぞれにかかる時間を仮定した。
計算方法は単純で、GOMSモデルを用いて動作を分割したのち
\(PBPBP = 3P+2B\)
のようにして合計時間を計算する。 - Fittsの法則
マウスでポインティングするのにかかる時間 - Hickの法則
複数項目から一つを選ぶのにかかる時間
心理物理学的実験
錯視の実験
実験評価について
- 2件法、3件法
YES,NOか、どちらでもないを入れるか。
“どちらでもない”が選択肢に入るとこれを選びがちになり、良い結果が得られないこともある。
2件法は研究側にとって、3件法は被験者にとってやりやすい
閾値について
ある刺激強度sに対し、被験者の知覚確率が50%になる点。
一般にP(s)はシグモイドに従う
\(P(s) = \frac{1}{1 + e^{-\frac{s-s_0}{\sigma}}}\)
〇 計測方法
| 方法 | 特徴 | 利点 | 欠点 | 使いどころ |
|---|---|---|---|---|
| 調整法 | 被験者が自分で閾値を調節する | 直感的、簡単。感覚に敏感 | 再現性に劣る。恣意的 | 予備的探索実験 |
| 極限法 | 最大値、最小値から交互に試す | 主観的誤差を抑える。比較的簡単で高精度 | 期待誤差(ヒステリシス)や慣れ | 基礎的かつ精度の高い測定が求められる場合 |
| 上下法 | 変化したらもとに戻す。変化のさせ方は変えられる。 | 簡単、早い | 閾値付近を繰り返すため被験者が疲れる。 | |
| 恒常法 | ランダムに提示し、知覚確率が50%になる点(主観的等価点)、つまり最も微妙な刺激条件を求める。 | 馴れの影響やヒステリシスが少ない | 効率が悪い。時間がかかる。 |
- P(s)の計算
- 調整法 : \(\frac{1}{n}\sum_{i=1}^{n}s_i\)
- 極限法 : 平均
- 上下法 : \(\frac{1}{n}\sum_{i_1}^{n} r_i\)
- 恒常法 : \(\frac{1}{1 + e^{-\frac{s-s_0}{\sigma}}}\)
- ヒステリシス
過去の変化(履歴)に依存して出力が変わる現象 - 上下法について
どのタイミングで刺激の上下を変えるかによって、被験者の感知率をある程度変化させられる。
例えば 2up-1down 形式だと
収束値 = \(P(s)^2\)
という計算になる。 - 恒常法の閾値計算
- 刺激ごとの知覚確率を求める
- シグモイドの物理関数をフィッティング
- 知覚確率閾値の関係\(P(0) = \frac{1}{1 + e^{-\frac{s-s_0}{\sigma}}}\)
- この時の\(s_0\)が閾値
ウェーバー則とフェヒナー則
 刺激の差の知覚について、検出可能な最小差分をJND(just noticeable difference)と呼ぶ。
刺激の差の知覚について、検出可能な最小差分をJND(just noticeable difference)と呼ぶ。
ほぼ弁別閾を意味する。
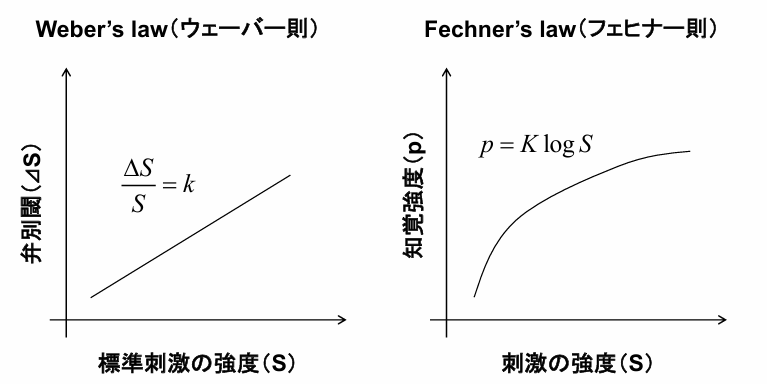
〇 ウェーバー則
差異閾値に関する法則。どれだけ変化したら人は違いとして認識するかを示した。
刺激の変化の間隔は相対的な差であることを示す。
強弱の激しい刺激には適用不可能
\(\frac{\Delta S}{S}=k\)
kはウェーバー比
例:100gの重さに対し2gが識別できたならば、200gでは4gになる。
〇 フェヒナー則
刺激に対する感覚の大きさを示した。
刺激が増加するにつれ、感覚は鈍くなることを示している。
ウェーバー則では刺激の認識を扱ったが、フェヒナーでは刺激全体の感覚の大きさを扱っている。
\(dp = K \frac{\Delta S}{S}\)
\(p = K \log{S}\) まとめて、
\(E = k \log{\frac{S}{S_0}}\)
dpは知覚変化量
信号検出理論
微弱な刺激に対する判断を数理的に説明する理論。
入力ありの場合も “Signal + Noise” となるので認識しにくくなる。
刺激に対する反応を以下のように分けた。
| 信号入力 | 判断 | 名称 |
|---|---|---|
| True | True | Hit |
| True | False | Miss |
| False | True | FA(False Alarm) |
| False | False | CR(Correct Rejection) |
- 厳しいRegina、甘いJulie
教官からの電話→Hit減少、Miss上昇→Regina
彼女からの電話→CR減少、FA上昇→Julie
d’の計算
d’ := 弁別度
刺激や信号を正しく区別する能力の指標。式は2種類ある。
- \[d' = \frac{r_+ - r_-}{\sigma_r}\]
刺激の応答分布(反応値r)の平均の差を標準偏差で割った値。
理論的な定義式。 \(r_+\)が反応ありの場合の反応の平均(Hitスコア) \(r_-\)が反応なしの時の反応の平均(FAスコア) を示す。 - \[d' = z(CR率) - z(Miss率)\]
実験結果から求める。
\[P = \int_{-\infty}^{z} N(0,1) dz\]
zの定義は以下\(-\infty\)からどれだけ積分すれば Hit・FA率の値にたどり着けるか?
例:
\(P_{Miss} = 0.1\)、 \(P_{CR} = 0.6\)
\(z_{Miss} = -1.28\)、 \(z_{CR} = 0.25\)
\(d' = z_{CR} - z{Miss} = 0.25 + 1.28 = 1.53\)
2FA taskにおけるd’計算
2FA task(二者強制選択課題)
\(d' = \sqrt{2} z(p)\)
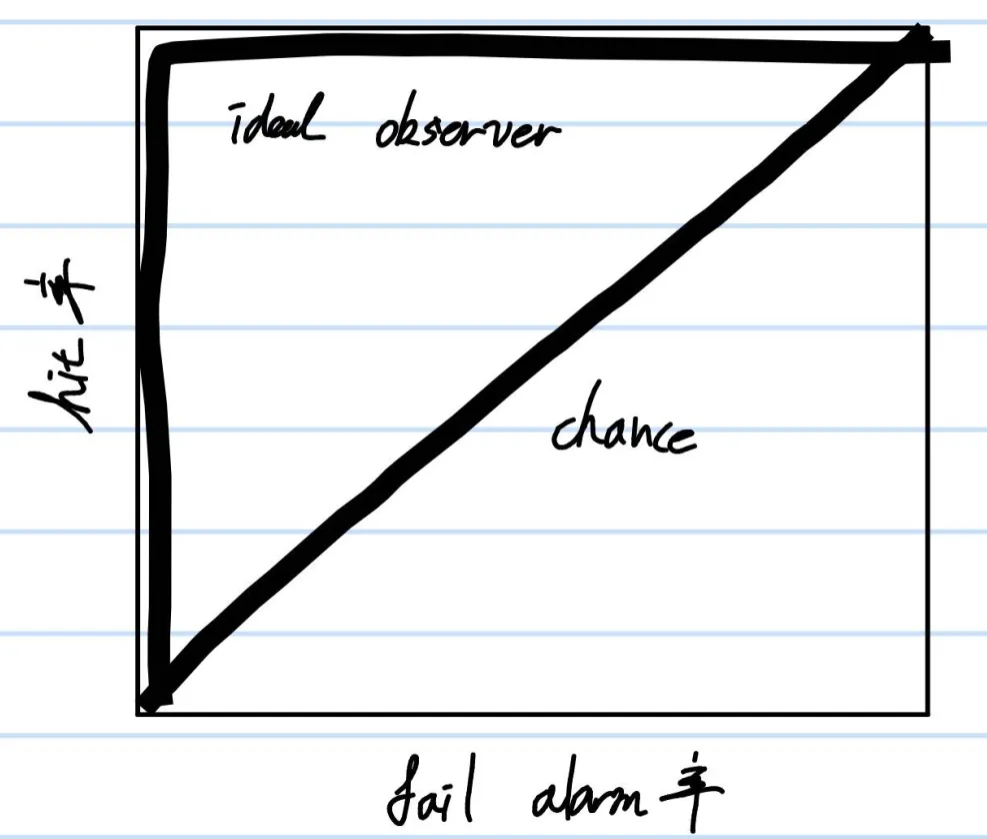
ROC
Hit率とFA率の関係を示すグラフ。 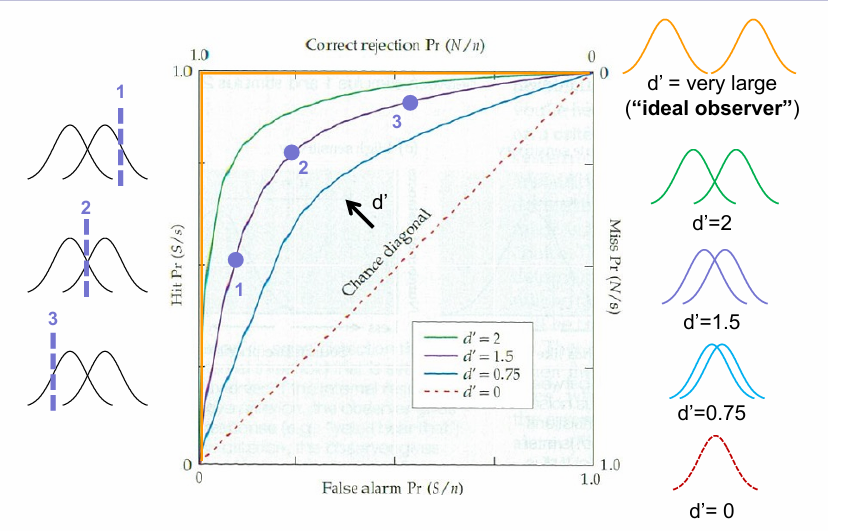
軸の説明
- 横軸
FA率 偽陽性率 : FPR = \(\frac{FA}{CR + FA}\) - 縦軸
Hit率(感度) 真陽性率 : TPR = \(\frac{Hit}{Hit + Miss}\)
上半分と下半分でそれぞれ割合を計算してる。
理想的なモデルは左上に、性能ゼロなら対角線に沿う。
d’(感度)が高いほど左上に膨らむ。
尺度
測定のために採用される基準
尺度に割り当てられた値を尺度値、尺度値を割り当てることを測定という。
| 尺度名 | 説明 | 操作 | 変換 | 代表値 | 例 | 備考 |
|---|---|---|---|---|---|---|
| 名義尺度 | 分類するためだけに用いられる | 許されない | 1対1対応ならば可能 | 最頻値 | 背番号、学籍番号 | カテゴリー変数ともよばれる |
| 順序尺度 | 順序情報に意味がある | 許されない | 矛盾しない単調変換 | 最頻値、中央値 | モース硬度、震度、不快指数、成績席次 | 成績が1位の人と3位の人の子供が2位になったりはしない |
| 間隔尺度 | 間隔にのみ意味がある | 加減算のみ。比に意味はない | 最頻値、中央値、平均値 | (セ氏、カ氏)温度、西暦、日付 | 比には意味がないが、差分の比は意味がある。 | |
| 比例尺度 | 数値と、その比に意味がある | 加減乗除すべて | 最頻値、中央値、平均値 | ほとんどの物理量(絶対温度、長さ、年齢) | 絶対原点を定め得る |
正規分布
\(N(\mu,\sigma^2) := \frac{1}{\sqrt{2\pi \sigma^2}} \exp( - \frac{(x-\mu)^2}{2\sigma^2} )\)
評価方法
- SD法
評価対象の類似度を形容詞的評価で求める。 -
評価の定式化(仮説の検定)
仮説を立て(対立)その反対のことを考える(帰無説)。
帰無説が生じない確率が低いと、仮説が正しかったといえる。(じゃないじゃない) -
t検定
A,Bが分散の同じ正規分布に従うと仮定
m個の標本を取り出したときの分布をt分布と言い、以下に従う。
\(t:=\frac{\bar{x}-\mu}{\sqrt{v^2/m}}\)
これは自由度(自分で決められる個数)がm-1となることが知られている。
自由度が大きいほどt分布はとがる。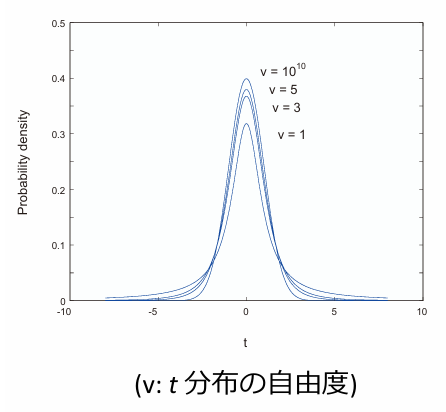
- p値
帰無仮説が正しいときに標本が母集団から選ばれている確率
正規分布の端っこの確率
\(P = \int_{t_\alpha}^{\infty} p(x)dx\)
分散分析
3つ以上の母集団の平均値に差があるか判定する。
時間があったら書く
脳について
neuron
方位選択性コラム
物体形状選択制
不変性
脳波の種類
- 自発脳波
何もしなくても出る。 - 誘発脳波
外部からの刺激や思考、認知によって発生する。
脳活動の計測方法
各手法の比較 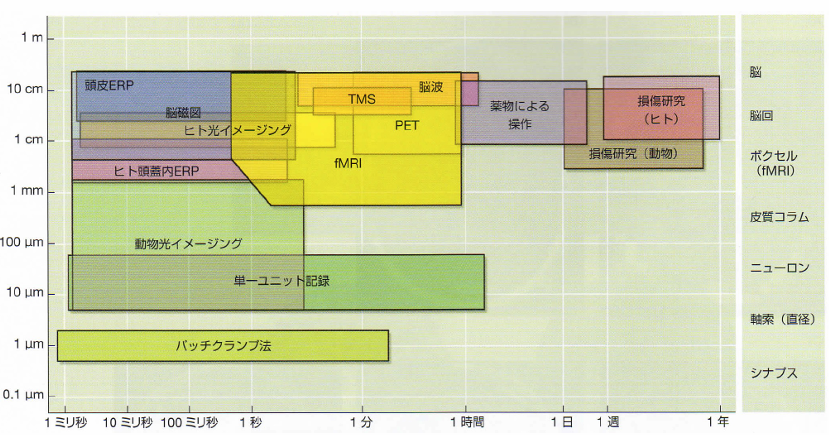
| 手法 | 原理 | 長所 | 短所 |
|---|---|---|---|
| 侵襲的計測 | 電極を脳に刺す | ノイズの少ない入力を得られる。 | 人で実験することが難しい |
| EEG(脳波) | 頭皮に電極を付け、頭蓋骨を通じて伝わってきた電気活動を計測 | 時間的に正確な計測が可能。簡単 | 信号がゆがむ(空間的に不正確) |
| MEG(脳磁場) | ニューロンが発する電流により、周辺に磁場が発生する。これを超電導状態にあるコイルを用いて測定する | 時間的に正確な計測が可能 | 信号がゆがむ(空間的に不正確)、信号が微弱 |
| fMRI | 脳の活動により酸素化ヘモグロビンと脱酸素化ヘモグロビンの割合が変化する。これにより起こる局所的な磁場の変化(BLOD信号)を検出し、脳の活動場所を時系列順に可視化する。 | ミリ単位で空間的に正確 | 血流の計測なので時間的に秒単位で遅い。神経細胞の直接計測ではない |
| PET | 放射性同位体で標識した薬剤を投与し陽電子の放出を通じて体内の代謝活動や血流、神経伝達を画像化する。 | 代謝や神経伝達活動を直接、定量的に観察でき、脳以外にも応用可能 | 時間的に遅く、空間分解能もfMRIに劣る。また運用コストが非常に高い |
| NIRS | 酸素化、脱酸素化ヘモグロビンの吸光度の違いを利用し、脳の血流変化を測定する。 | 小型、軽量な装置で測定でき、安全であるため幅広い年齢層に適用可能。 | 脳皮質の浅い部分のみの測定であり、分解能ではfMRIに劣る。 |
MEG(脳磁場計測)とEEG(脳波計測)
MEGの比較
- EEGと比較した場合の
- 長所
頭蓋骨や皮膚の影響を受けづらい。また、空間的により精密なデータをとることができる。 - 短所
血流による磁場信号は極めて微弱であり、ノイズに弱い
- 長所
fMRI(機能的磁気共鳴画像計測)とPET(陽電子放出断層撮影法)、NIRS(近赤外線分光法)
fMRIの比較
- PETと比較した場合の
- 長所
空間分解能が高い。運用コストが低い。 - 短所
神経活動を直接計測することはできない。計測が定量的ではない。
- 長所
- NIRSと比較した場合の
- 長所
空間分解能が高い - 短所
大型で運用コストが高い。被験者への制約や安全上の考慮から乳幼児や高齢者を対象とした計測をしづらい。
- 長所
測定結果の利用方法
なぜfMRIが必要なのか
そもそも、これらの測定をする目的は情報のエンコード、デコードをするためである。
変換としてやっていることはいたって単純であり、\(B = GJ\)という線形の式を解いているだけである。 Bが電気信号、Gが刺激で、Jがその変換行列を示す。
MEG信号を測定すると刺激に対するリアルタイムな脳の反応を観察することができるが、情報の個数があまりに少ない(劣決定系の連立方程式)。そこでfMRIの登場である。
時間的に早い測定こそできないものの、脳内で反応が起こる部位を精密に測定することができる。
MEGとfMRIの2種類の信号を用いることで十分な量のBが確保でき、J行列を算出することができるのだ。
MRIの原理
めちゃくちゃ適当に説明すると 水素の向きをそろえ、振動させる。外から力がかからなくなると水素は元居た位置に戻ろうとするので、 その信号を読み取る。すると観察範囲内の水分の分布が分かる。 人間の体はほとんど水なので、体内部の様子が大体わかる。
その他の評価可能な指標
| 指標 | メモ |
|---|---|
| 心拍 | 心電図ECG。作業、精神負荷の測定 |
| 血流 | 指先で測定する。作業の肉体定期負荷 |
| 発汗 | 汗により変化する皮膚の電位、抵抗を測定 |
| 眼球・瞳孔 | フリッカー値=人間が認識できる光の瞬き周波数 |
| 筋肉 | 筋電位(EMG)。針を刺すか、電極を貼る/筋音図(MMG)。筋収縮による振動 |
| 内分泌系 | ストレス評価 |
ブレイン―マシン・インタフェース
Brain Machine Interface(BMI)とは、脳の理解に基づく、人間機能の工学的補償、拡張のことである。
interfaceとは界面のことであり、この技術は脳と機械の界面をつなぐ、という意味がある。
エンコーディング、デコーディング
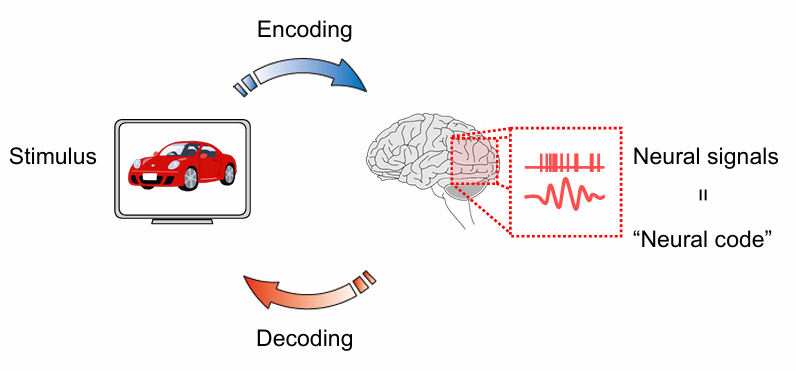 刺激入力を人間の脳が理解できる形に変換することをエンコーディング、逆に脳活動から元の刺激を取り出すことをデコーディングと呼ぶ。
刺激入力を人間の脳が理解できる形に変換することをエンコーディング、逆に脳活動から元の刺激を取り出すことをデコーディングと呼ぶ。
難しいことをしているようだが、デコーディングとはつまり、線形回帰問題を解いているだけである。
2種類のBMI
-
出力型
脳から機械に信号を送る
前章で説明した。 -
入力型
機械や装置から脳に信号を送る- 侵襲型
人工内耳、人工視覚 - 非侵襲型
脳磁気刺激、電気刺激
- 侵襲型
様々な例
- 脳信号による機械操作
ラットや猿の頭に電極を差し、電気変化に従って動くアームを用意する。動物は脳によるアームの動かし方を学習する。 - nervesの代替
神経を切断し、脳信号を変換して筋肉に送る装置を取り付ける。これにより神経の破損した腕を脳信号で動かすことができる。 - カーソル動作
人間の脳に電極を刺し、脳の動作とカーソルの動作を紐づける。 - 視覚情報の分割
能信号の類似性により、見た画像を並べ替える。 - 人工内耳、視覚
- 体性感覚
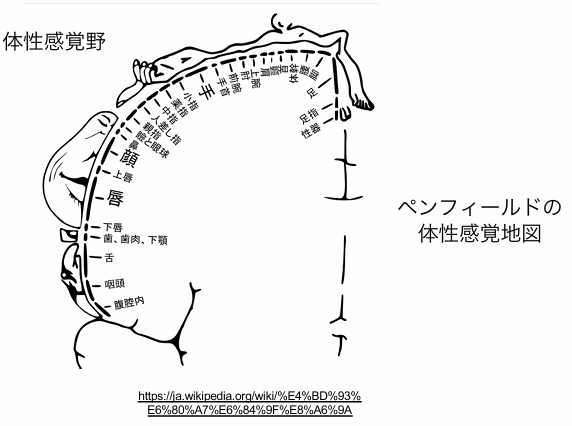
体の感覚のうちどれが近く、また重要であるか
2024過去問
問1 ユーザーモデルと設計モデルとは何かを、講義で言及した一般的な視点から説明せよ。また、冷蔵庫の例でよく生じるユーザーモデルと設計モデルのずれ、およびそれによって引き起こされる問題について具体的に説明せよ
ユーザーモデルとは、ユーザーがこれまでの生活から獲得した、機械やシステムに対して特定の操作をしたときに期待する結果や動作であり、 それに対し設計モデルとは実際に機械やシステムが返す出力である。
冷蔵庫の例において、ユーザーが冷凍庫の温度のみを下げるために冷凍庫の温度調節つまみのみを冷却側に回した場合、 ユーザーの期待に反し冷蔵庫の温度まで下がってしまう。 これは、実際の設計モデルでは冷蔵庫のつまみは冷凍庫の出力の内どの程度の割合を冷蔵庫に送るかを示しているものであるためで、 ユーザーが冷凍庫の冷却出力を上げると冷蔵庫のつまみを動かしていないにもかかわらず 冷蔵庫の温度まで下がってしまう、という問題が起こる。
問2 フールプルーフ、フェイルセーフの考え方をそれぞれ述べよ。また、それぞれの具体例を講義で説明したものの中から一つ挙げ、なぜそれらがフールプルーフ、フェイルセーフとして機能するのかを具体的に述べよ。
どちらも誤操作により機器が故障、損傷することを防ぐための設計である。 フールプルーフとはユーザーの動作を制限することにより誤操作を防ぐ設計であり、 フェイルセーフとはユーザーが誤った動作をすることを予想し、対策機能を付ける設計である。
フールプルーフの例としてはSDカードの形状が挙げられており、 差し込む際の上下左右が一意に定まる形状にすることでカードや読込機械を損傷することを防いでいる。
フェイルセーフの例としてはヒューズが挙げられており、 定格以上の電流が流れたり水没などにより短絡が起きた場合にヒューズが電流を遮断することで回路全体が故障することを防いでいる
問3 調整法、極限法、恒常法について説明せよ。その際、それぞれの長所と短所を述べること
3つの方法は人間の認知機能を調べる際に用いられる手法であり、人間が変化を認識できる閾値を測定することができる。
調整法は、被験者自身が刺激の量を調節しながら閾値を見極める方法である。 簡単で直感的に実行でき感覚に対して精密な実験結果が得られるが、結果が恣意的になり再現性に劣る。
極限法は、被験者が変化を感じるまで刺激を変化させていき閾値を判定する方法で、この際初めの値に最大値、最小値を交互に設定する。 被験者の主観による誤差を抑えることができるため調整法より精度は出るが、ヒステリシスや被験者の馴れの影響が生じる。
恒常法は、定められた範囲の刺激をランダムに決められた回数だけ与え、それぞれどう感じたかを判定する方法である。 ヒステリシスや慣れの影響を受けないが、効率が悪く3つの中でもっとも時間がかかる。
問4 鑑定士が100件の真偽判定を行ったところ、結果は次の表の通りであった。
| 本物と鑑定した | 偽物と鑑定した | |
|---|---|---|
| 実際は本物であった | 55件 | 20件 |
| 実際は偽物であった | 10件 | 15件 |
(1) この鑑定士の正答率を求めよ
表より、Hit: 55、Miss: 20、FA: 10、CR: 15である。
正答率は、(Hit + CR) / 100 = 0.7
70%
(2) この鑑定士の真偽を見分ける感度を\(d'\)で定量化するとする。\(d'\)の値を求めよ。その際、\(z_{miss} = -0.62\)、\(z_{correct rejection} = 0.25\)であるを利用してよい。
\(d' = z_{correct_rejection} - z_{miss} = 0.87\)
問5 信号検出理論とは何かを、”閾値”、”行動選択基準”、”感度”という3つの用語をすべて使って説明せよ
信号検出理論とは、微弱な刺激の有無に対する人間の判断過程を数理的に説明する理論である。
人間の判断は、単に刺激の大きさが閾値を超えているかどうかによって決まるわけではなく、 そこには個人の心理的バイアスが影響している。
このような判断過程を定量的に分析するため、 刺激をどれだけ正確に識別できるかを表す「感度」と、 刺激に対して反応する傾向(保守的か積極的か)を表す「行動選択基準」 という2つの指標を用いる。
複数の異なる条件下でこれらの指標を測定することで、 人間が刺激に反応する心理的な閾値や判断傾向を明らかにすることができる。
問6 ROC曲線におけるideal observerとchanceに相当する曲線をグラフに描け。ただし、縦軸をhit率、横軸をfalse グラフの左下は原点(hit率とfalse alarm率が0の点)とする(図中ではそれぞれの線がどちらを表すかを明確に記すこと)
問7 非侵襲的脳活動系素行とは何かを説明し、脳磁場計測と機能的磁気共鳴画像計測の長所と短所をそれぞれ述べよ。その際、脳磁場計測については脳波計測と、機能的磁気共鳴画像計測については近赤外線分光法と比較すること。解答としては”脳磁場計測の長所はxであり、短所はyである。脳波計測と比べると脳磁場計測はaという点が長所であり、bという点が短所である。一方、機能的磁気共鳴画像計測の長所はpであり、短所はqである。近赤外線分光法とくらべると機能的磁気共鳴画像計測はcという点が長所であり、dという点が短所である”という形式で書くこと。
脳磁場計測の長所は 時間的に精密な計測が可能な点であり、短所は 空間的な精度に劣ることである。
脳波計測と比べると脳磁場計測は 頭蓋骨や皮膚などの影響を受けづらいという点が長所であり、 血液により発生する磁場信号が微弱であるためノイズに弱いという点が短所である。
一方、機能的磁気共鳴画像計測の長所は 空間的に精密な測定が可能な点であり、短所は 情報が時間遅れになってしまう点である。
近赤外線分光法とくらべると機能的磁気共鳴画像計測は 脳の深部の血流まで測定することができるという点が長所であり、 機器が大きく、運用にコストがかかるという点が短所である
問8 画像刺激をヒトが観察している状況を考える。この時、エンコーディングモデルとデコーディングモデルとはそれぞれどのようなモデルであるか説明せよ
エンコーディングモデルとは、 画像を、画像を見たことにより脳に起きる刺激に変換するモデルである。 反対にデコーディングモデルとは、 脳に起こった信号からヒトが今見ている画像を復号するモデルである。
問9 あなた自身が考える究極のヒューマン-マシン・インターフェースについて述べよ。可能な限り独自の視点で論考すること。
私が考える究極のHMIとは人間の機械化です。
近年技術の発達により機械がユーザーに近いものになっています。 携帯電話は小型化し、ついには腕時計で通話やメッセージのやり取りができるようになりました。 また様々な機械が互いに接続され、音声認識で自由に様々な機器を操作することも可能になりました。
そこで私は、人間と機械をさらに近づける次の手立ては入力装置としての人間の進化だと考えました。 機械がどれだけ複雑化しても人間がそれらにアクセスするために使えるリソースは自分の体に限られています。 この限界を超えるために、人間が元来持っていない機能を追加してしまえばよいのではないでしょうか。
私がそのようなHMIに求めるのは次の3つです。
- 人間に組み込まれること
- 指や声の入力ではなく電気信号により動くこと
- 充電や給電を必要としないこと
ヒトの進化としてのインターフェースは、取り付けるもの、使うものではなく、ヒトの新しい機能として組み込まれるべきだと考えます。 このインターフェースにおいて、機器の動作は必ずしも思考と一貫性を持つ必要がなく、 例えば指をタップすることで何かしらの信号が送られる、というようなリモコン機能で十分です。 複雑な脳波の読み取りを求めないことで汎用性を持たせることができます。 むしろこのインターフェースで重要なことは、それが生体部品として人間の身体に組み込まれることです。 人間の体内に埋め込まれた機器は、人間の運動をや電気信号を動力に動作します。 そしてこれらの機器により、人間は生来持つ機能を用いずに外界に干渉することができるのです。
人間の身体は実世界に干渉するのに適した形状をしていますが、マシンの世界においてはその限りではありません。 人間の形状に適した機械を作るのではなく、機械に適するように人間を改造したいです。