PID制御の実装
目次
このページを書いた後にコードを変更しているので画像と異なるシミュレーションやグラフが出てくるかもしれませんが、動けば大丈夫なはずです。
PID制御を体験してみましょう。
まずは、Robo-MECSの演習用githubをcloneしてください。
git clone https://github.com/Robomech-UEC/Robo-MECS_exercise.git
ファイルの中の004_control/002_feed_back/pole_simulationに今回使う、ポールのシミュレーション環境が入っています。まずは実行してみましょう。
必要なlibararyをインストールします。
pip install gymnasium pygame matplotlib pandas
ではまずは実行してみましょう
python example.py
もしかしたらほかに必要なlibraryがあるかもしれません。適宜インストールしてください。
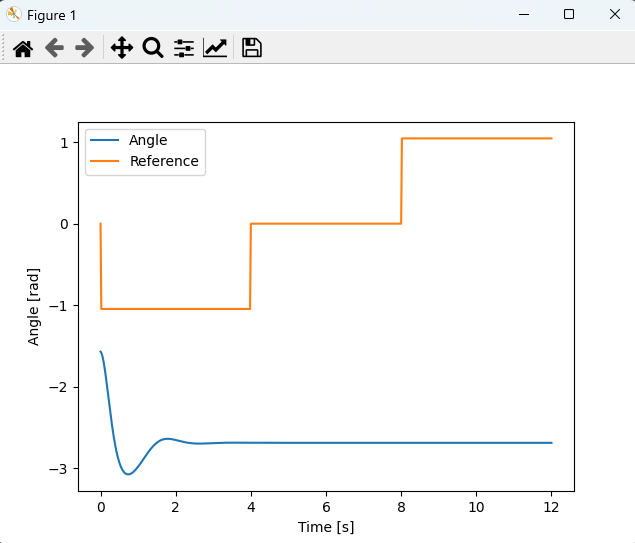
成功すると12秒のシミュレーションが流れ、その後グラフが表示されるはずです。
ここまでできたら、004_control/002_feed_back/pole_simulation/example.pyを編集していきましょう。
##################################で囲まれているところが編集するところです。
一番調節するのはここです。
# PID controller gains
# ここに制御ゲインを書く。
##################################
k_p = 0
k_i = 0
k_d = 0
##################################
角度の正規化プログラムを書きます。
# angle normalization
def normalize_angle(angle):
# 角度の正規化プログラム
##################################
##################################
return angle
角度の正規化とは、角度を-piからpiまでに制限することです。
これをしないと、2piを超えた角度が出力されてしまったときにエラーの値が大きくなりすぎ、入力がおかしくなってしまいます。
数式的に考えると
\(angle = \pi\)
PID制御を実装します。
# PID control
# ここに制御則を書く。
##################################
# 現在のpoleの角度と、目標角度
angle = pole.angle()
reference = refs[ref_id]
# エラーを計算し、エラーの差分と、積分も計算する
# いったん、エラー0を代入
error = 0
# エラーを正規化する
error = normalize_angle(error)
# トルクを計算し、poleに入力する(pole.torque_input())
# いったん、トルク0.1を入力
pole.torque_input(1.8)
##################################
time.sleep(dt)
角度と目標値を受け取り、